Product Details
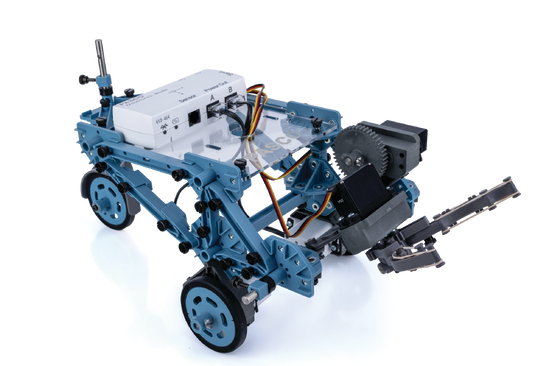
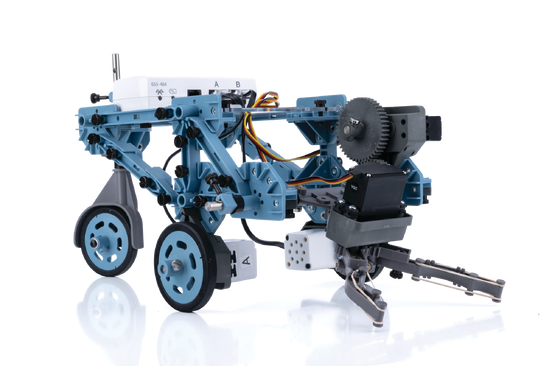



StructureBOT
This versatile robot is constructed out of PASCO Structures components, enabling students to build several different configurations of the StructureBOT (front-wheel steering, rear-wheel steering, with and without the gripper).
Description
The StructureBOT can navigate through a maze, turn in circles, and pick up objects with its gripper. The detailed instructions step the student through building the StructureBOT and learning to program the StructureBOT movement using Blockly coding embedded in PASCO Capstone or SPARKvue software.
The StructureBOT has a huge advantage over other conventional robot kits. Since the Blockly coding is embedded in PASCO Capstone and SPARKvue software, students can view and record the position and velocity of the BOT stepper motors in a live graph in the software. They can also view output variables from their code in digital displays so they can associate what motion the BOT is performing with sections of their code. This helps them trouble-shoot their code.
Features
Multiple configurations: With and without the gripper, two wheels or three wheels, front-wheel steering or dual back-wheel steering
Expandability: Add other PASCO Structures components to change the StructureBOT’s design
Expandability: Add other PASCO sensors to expand the bot’s capabilities
Perform These Experiments
Build the StructureBOT
Move the Bot Forward and Backward
Turning the Bot
Power Steering of Front Wheel
Moving Objects with the Gripper
Go to a Spot and Return
Navigate a Maze
Turn in a Circle
Create a Function
Further Exploration
Add a Wireless Motion Sensor to Avoid Obstacles
Add Two Light Sensors to Follow a Line
Add a //code.Node to Steer the Bot
Add a //code.Node for Turn Signals
Add a Wireless Light Sensor to Sort Colored Objects
How It Works
Students use PASCO Structures in this kit to build the StructureBOT.
Stepper motors and servo motors are used to move the BOT and its gripper.
The motors are powered and controlled by the StructureBOT’s //control.Node.
Students program the bot using Blockly coding embedded in PASCO Capstone or SPARKvue software.
The StructureBOT can connect to a computer wirelessly via Bluetooth or code can be uploaded to the StructureBOT to run autonomously.
What’s Included
1x //control.Node (PS-3232)
2x High Speed Stepper Motor (PS-2976)
2x Servo Motor (SE-2975)
1x Structures Gripper (ME-7025)
1x Gear Set (ME-7021)
1x Caster Wheel (ME-7023)
1x Structures Hinge (ME-7026)
1x Truss Set Screws (Set of 75)
4x Structures I-beam #1
6x Structures I-beam #2
4x Structures I-beam #3
7x Structures Connectors
2x Structures Full-Round Connector
4x Structures Angle Connector
2x Structures Wheels with Tires
1x Structures Medium Axle
3x Axle Bearings
5x Spacers
2x Collets
3x Motor Mount
3x Shaft Spline Adapter
12x 4-40 x 1/2 Phillips Screws
1x //control.Node Platform
2x Anti-backlash Screws
https://www.pasco.com/products/lab-apparatus/structures/motorized-structures/me-7029